问题求解(三) Open Topic 7 笔记
OT:距离索引(Distance Oracle)是一种用于查询精确或近似距离的数据结构,请调研至少1种精确距离索引和1种近似距离索引,讨论适用场景,结合例子介绍索引构造算法和距离查询算法的设计与分析。
Distance Oracle——空间与时间的权衡
简介
未加说明的定义见 [1] (Sommer, 2014)。
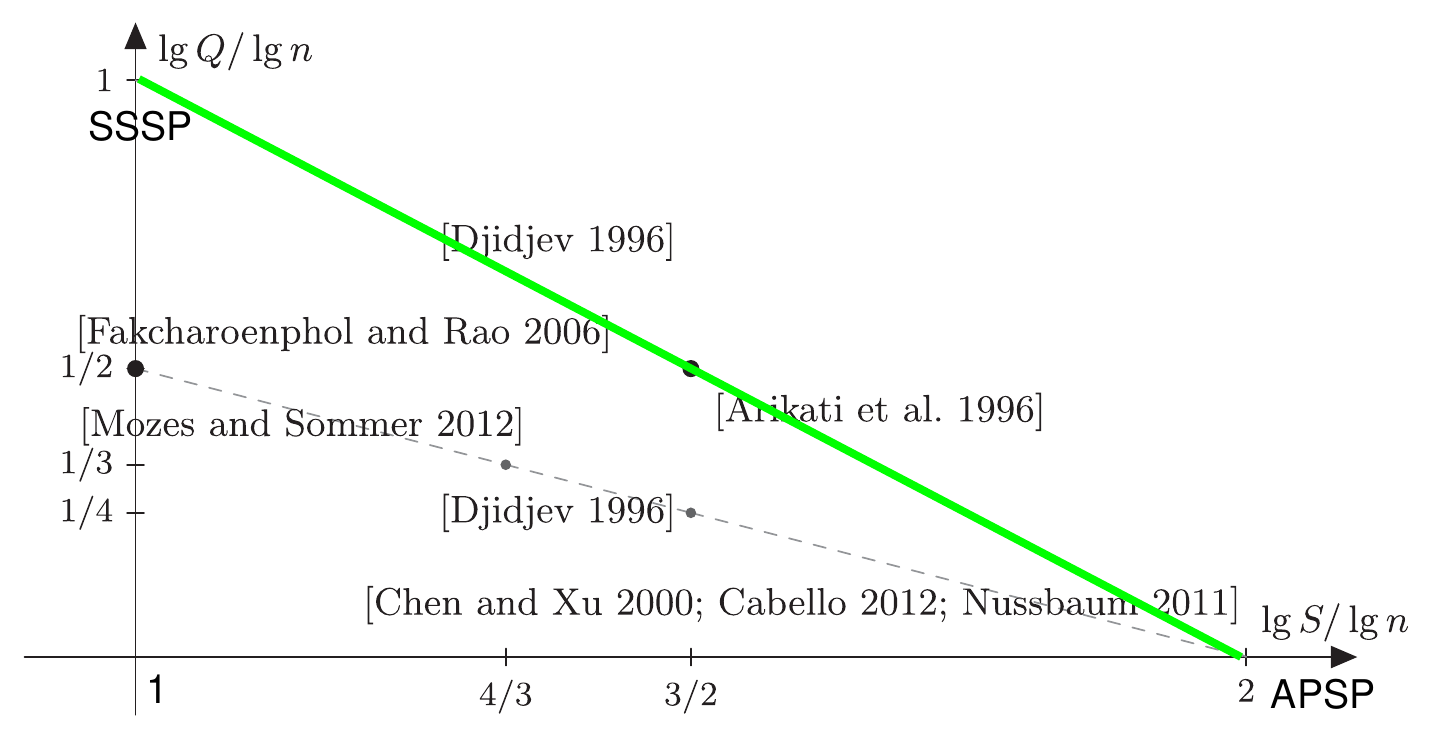
Distance oracle 是一种距离 stretch,空间 space 和单次查询时间 query time 的权衡的艺术。
适用于一般无向非负权图的 stretch < 2 的 DO
DO 的历史发现
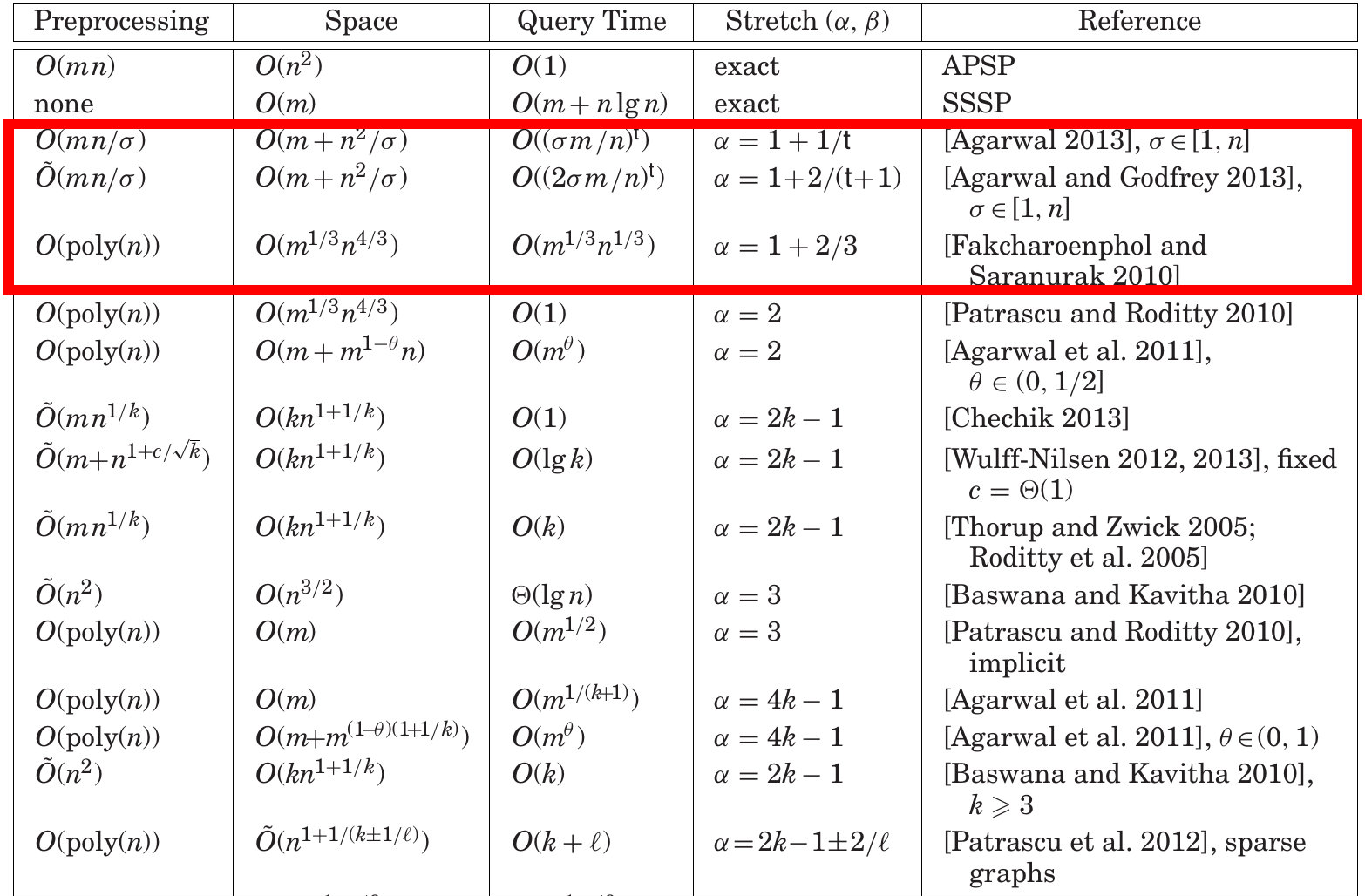
论文贡献
[2] (Agarwal, 2014) 提供了三种满足 stretch \(\alpha\in(1, 2]\) 的 DO。
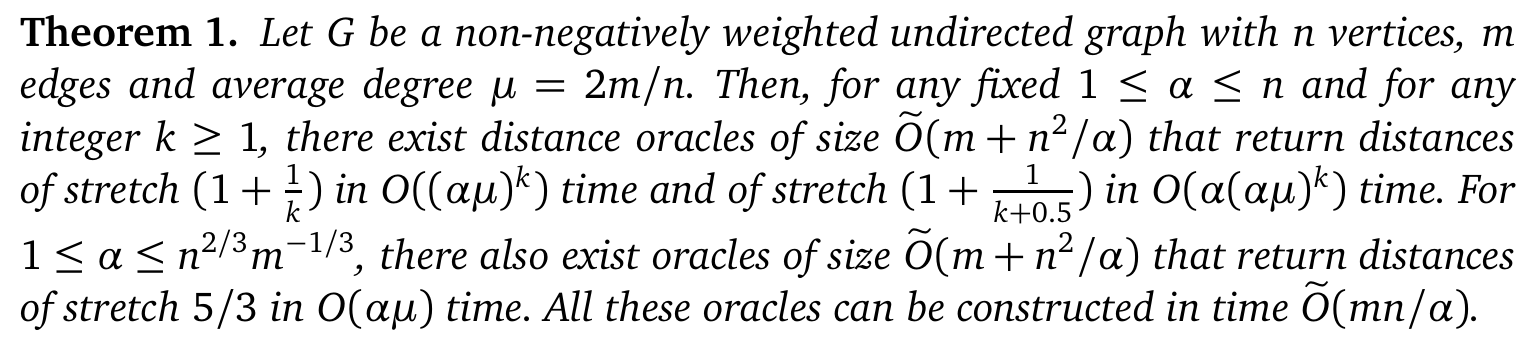
我们主要讨论第一个成果:
Result: 对于平均度为 \(\mu=2m/n\) 的图,对任意 \(1\le \alpha \le n\),存在 stretch 为 \(O(1+1/k)\),询问时间 \(T=O((\alpha \mu)^k)\),空间为 \(S=O(m+n^2/\alpha)\) 的 DO。
约束方程:
\[ S\times T^{1/k}=O(n^2) \]
主要思想
经典的 landmark 法:选一个 landmark 集 \(L\),对所有点存储到它们的距离。
合理地选择多级 landmark,使得估计距离 \(\delta(s, t)\) 和实际距离的误差尽量小。
和 Agarwal 的之前的成果相比:创新性地使用了双向方法来处理询问。
正是由于双向的优化,在不影响 space 和 construction time 的前提下,query time 得到了大幅优化:
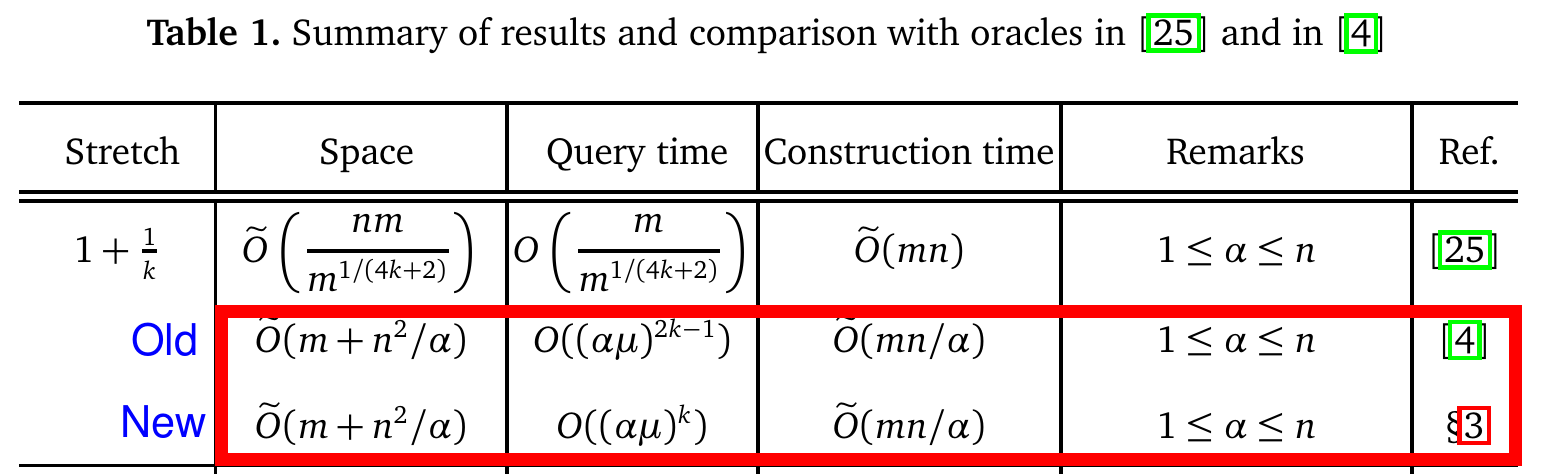
图的结构性预处理 - degree bounded
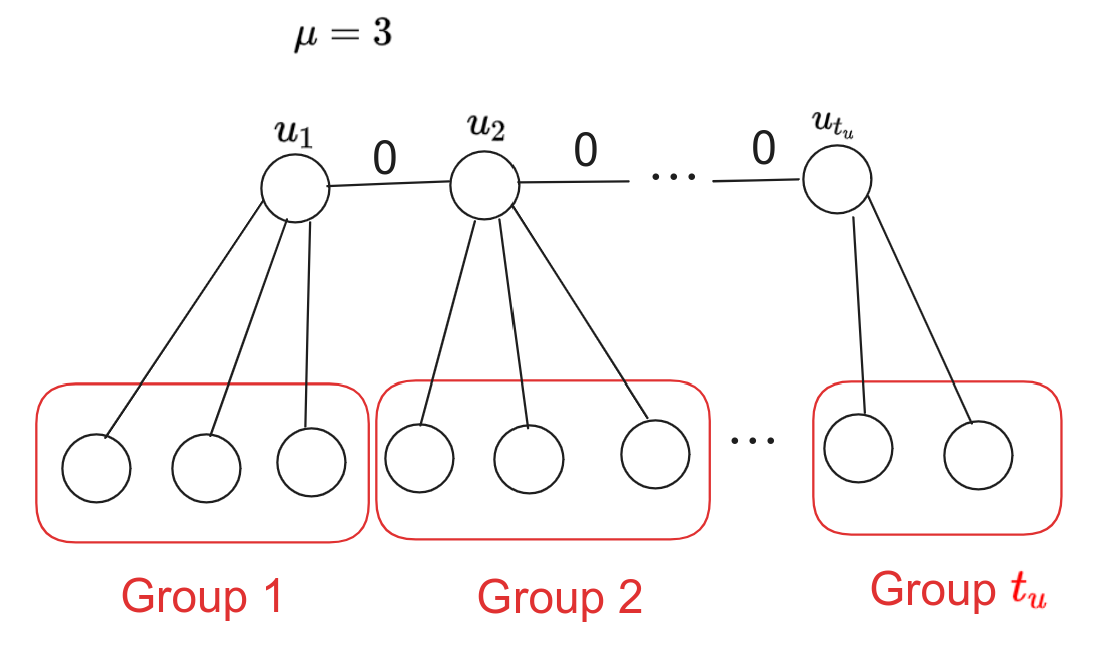
Theorem: 任何 \(n\) 点 \(m\) 边的图都可以转化为不超过 \(2n\) 点,所有点度数不超过 \(\lceil \mu + 2\rceil\) 的图。(\(\mu\) 是原图的平均度数,为 \(2m/n\))。
Construction: 在新图 \(G'\) 中,将所有点 \(u\) 转化为 \(t_u=\lceil \deg(u)/\mu\rceil\) 个点 \(u_1, u_2, \cdots, u_{t_u}\)。将原图中 \(u\) 的邻点分成 \(t_u\) 组,每组不超过 \(\mu\) 个,在新图中连到这 \(t_u\) 个点上。最后将这 \(t_u\) 个点在新图中用零边连成链。
基础定义
若选定了 landmark 集 \(L\),则对于任意一点 \(v\in V\):
\(l(v)\):距离 \(v\) 最近的 \(L\) 中顶点;\(r_v\):\(v\) 和 \(l(v)\) 之间的距离。
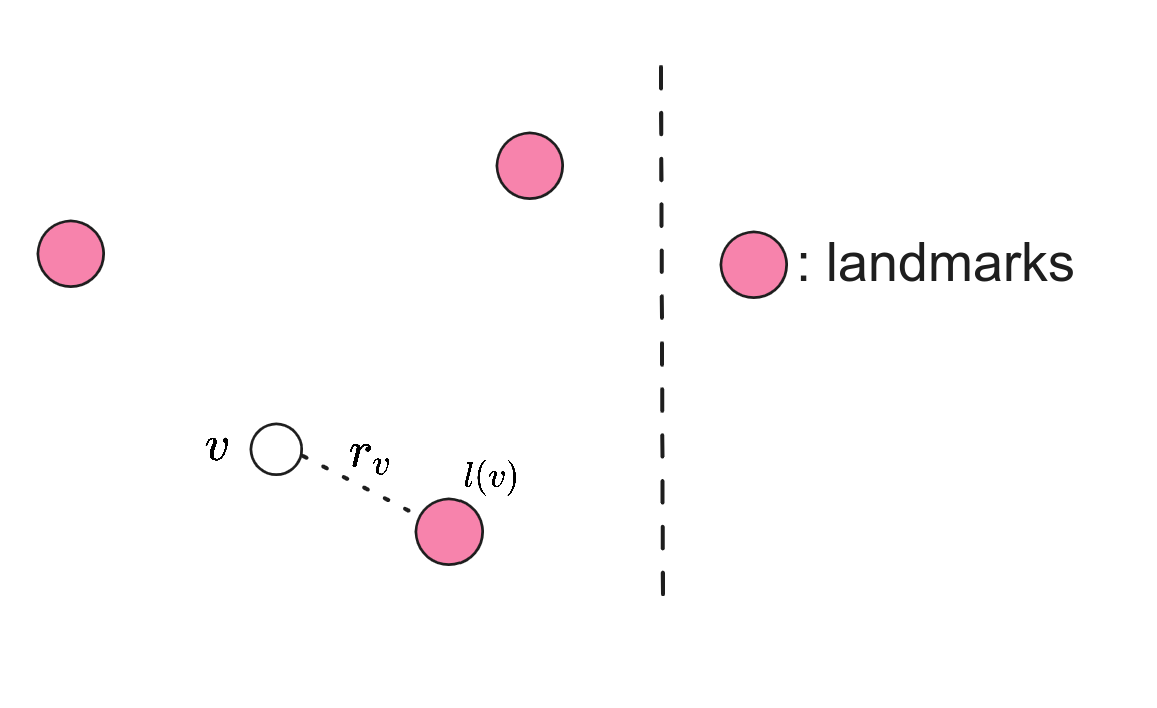
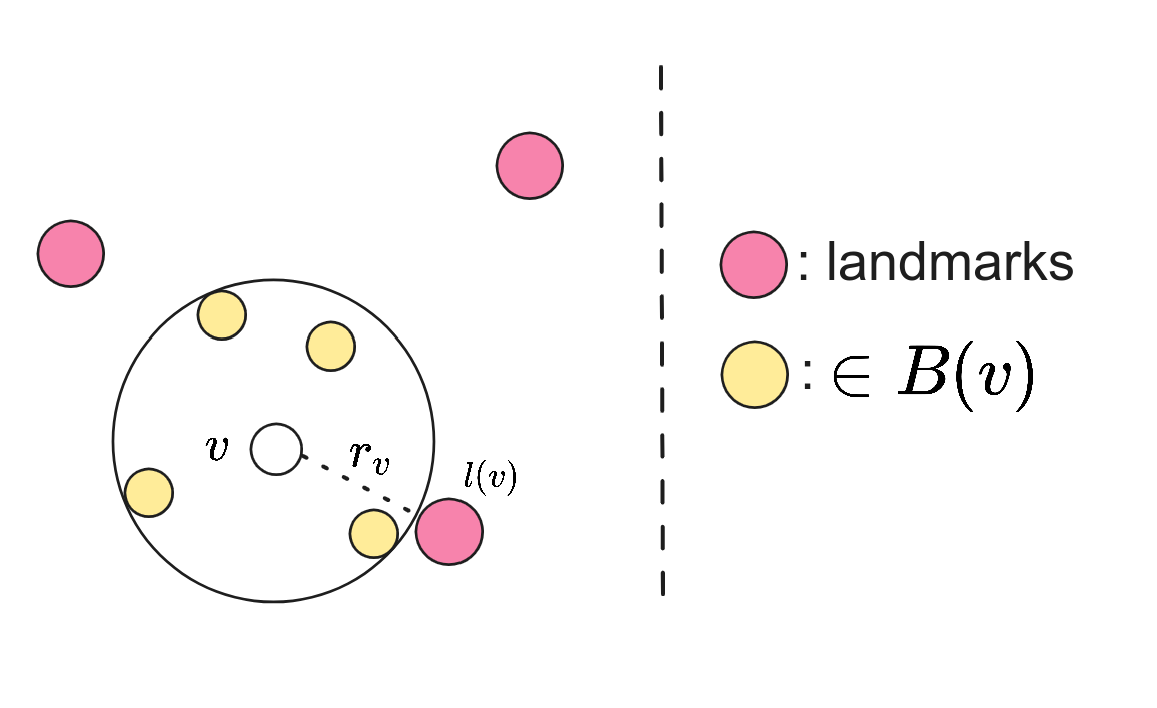
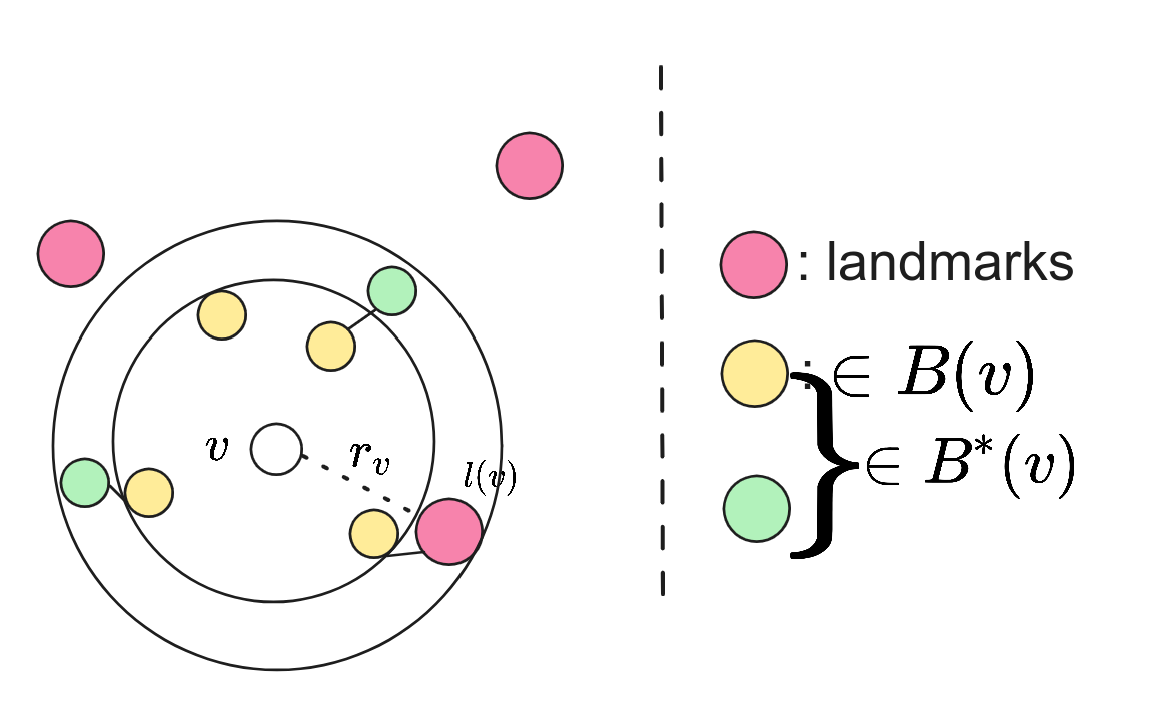
\(B(v)\):所有到 \(v\) 距离小于 \(r(v)\) 的点的集合。
\(B^*(v)\):在 \(B(v)\) 中或与 \(B(v)\) 中顶点相邻的点的集合。
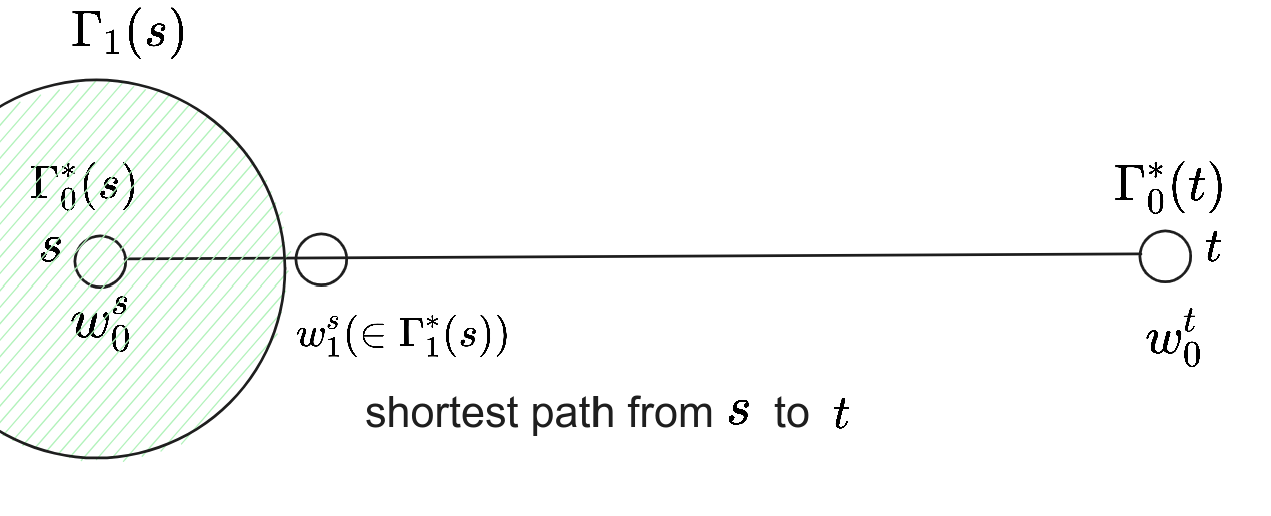
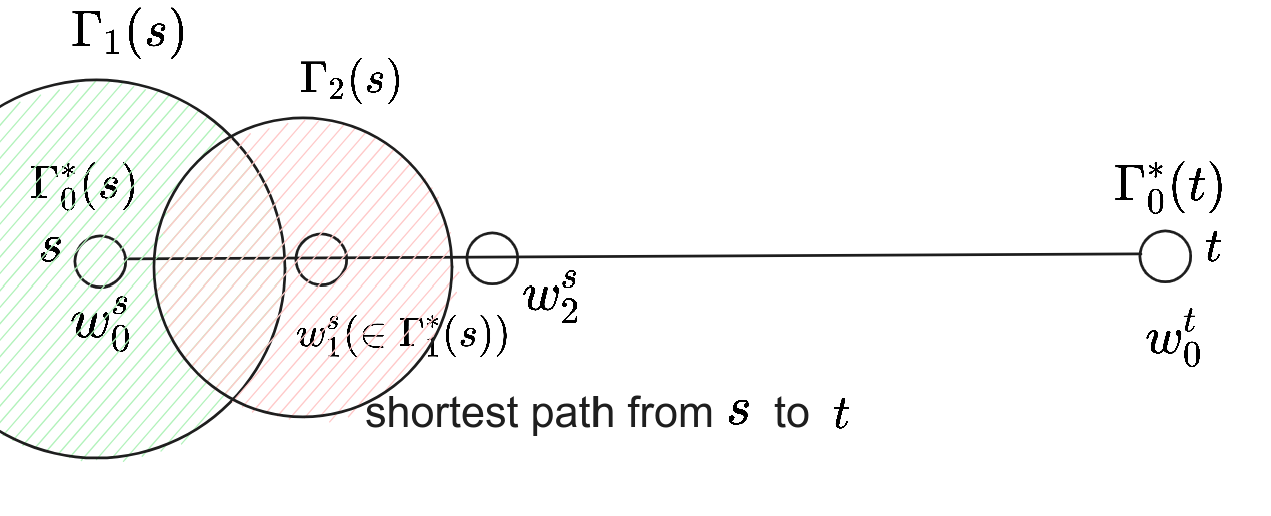
迭代定义:
\[ \Gamma_i^*(v)=\bigcup_{w\in \Gamma^*_{i-1}(v)} B^*(w);\quad \Gamma_i(v)=\bigcup_{w\in \Gamma^*_{i-1}(v)} B(w) \] 且 \(\Gamma_0^*(v)=v, \Gamma_0(v)=\varnothing\).
landmark 集 \(L\) 选取
Theorem: 对于最大度 \(\Delta(G)=\mu\) 的图 \(G\),对任意 \(1\le \alpha\le n\),存在 landmark 集 \(L\) 大小为 \(\tilde O(n/\alpha)\),满足对任意 \(v\in V\),\(|B(v)|=O(\alpha)\) 从而 \(|B^*(v)|=O(\alpha\mu)\), WHP。
证明:[4] (Alon & Spencer, 2016).
算法预处理
对每个点 \(v\),使用一个哈希表存储到所有 \(|L|=\tilde O(n/\alpha)\) 个 landmark 的距离,以及 \(l(v)\) 和 \(r_v\)。
每个点使用 Perfect hashing,空间为 \(\tilde O(n/\alpha)\)。故算法总空间 \(\tilde O(m+n^2/\alpha)\)。
算法主过程
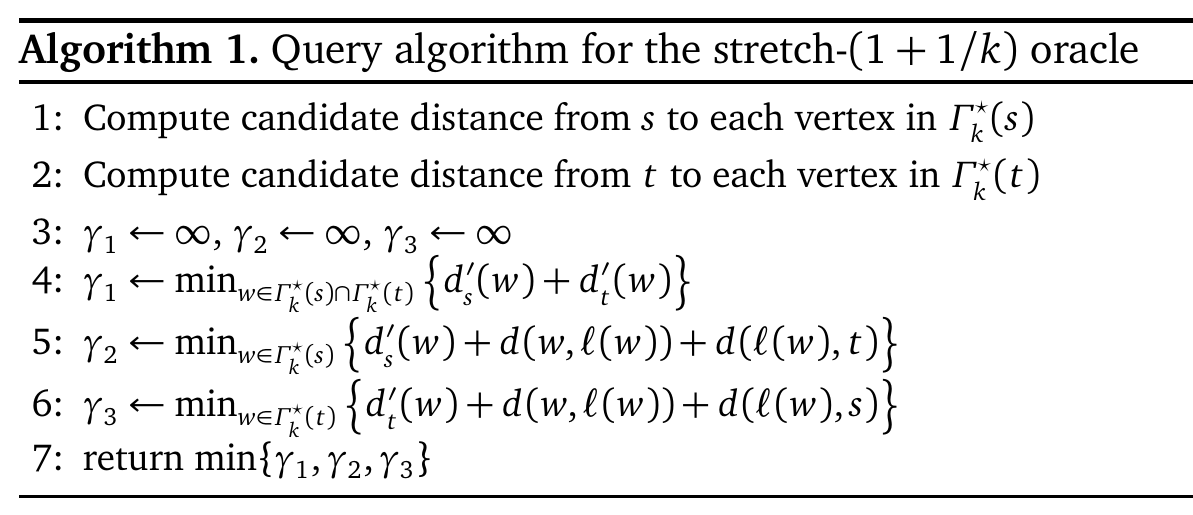
对于 \(s\) 和 \(t\) 的查询,分为三部分。(Candidate distance 意为,只从 e.g. \(\Gamma_k^*(s)\) 内部更新的距离)
\(s\) 到 \(t\) 的最短路
在 \(s\) 到 \(t\) 的最短路中,我们考虑 \(\Gamma^*_i\) 的递归表现:
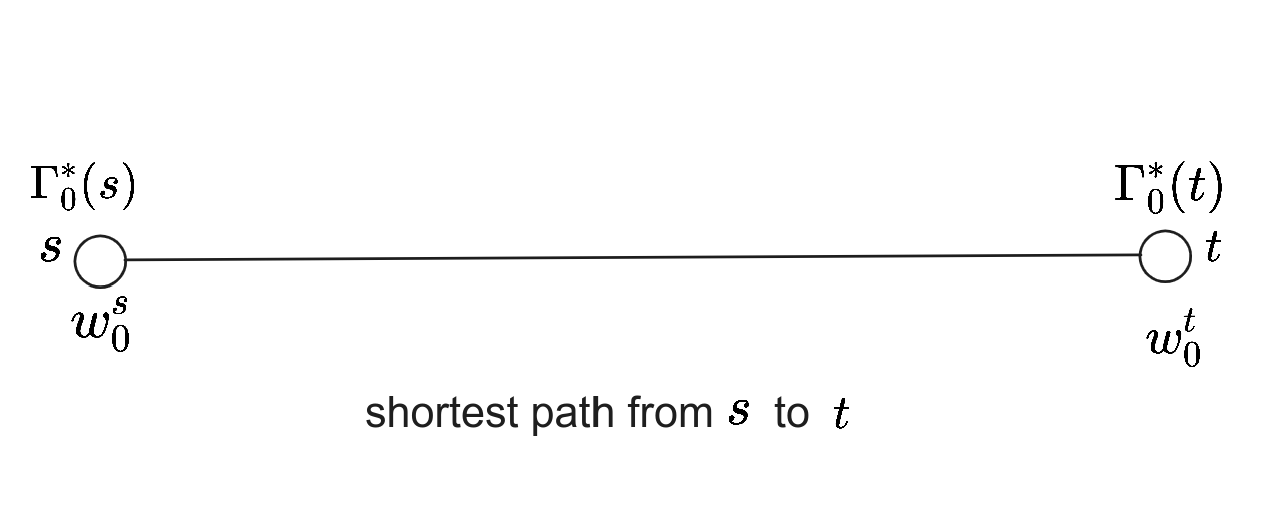
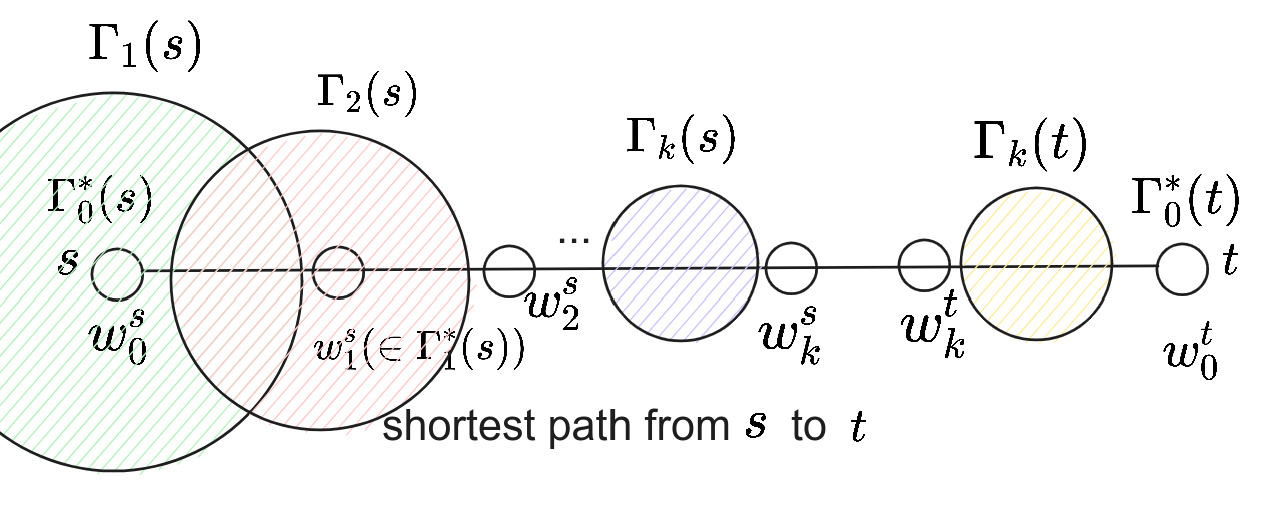
以下性质对于 \(s\) 和 \(t\) 是对称的,故只证 \(s\).
Property 1. 在 Query 的 1.2. 行后,可以得出所有 \(s\) 到 \(w_j^s(0\le j\le k)\) 的距离,也就是求得的 Candidate distance。
Property 2. 设 \(r^s\) 是 \(\min_{0\le j<k}r_{w^s_j}\),则 \(d(s, w_i^s)\ge i\cdot r^s\)。
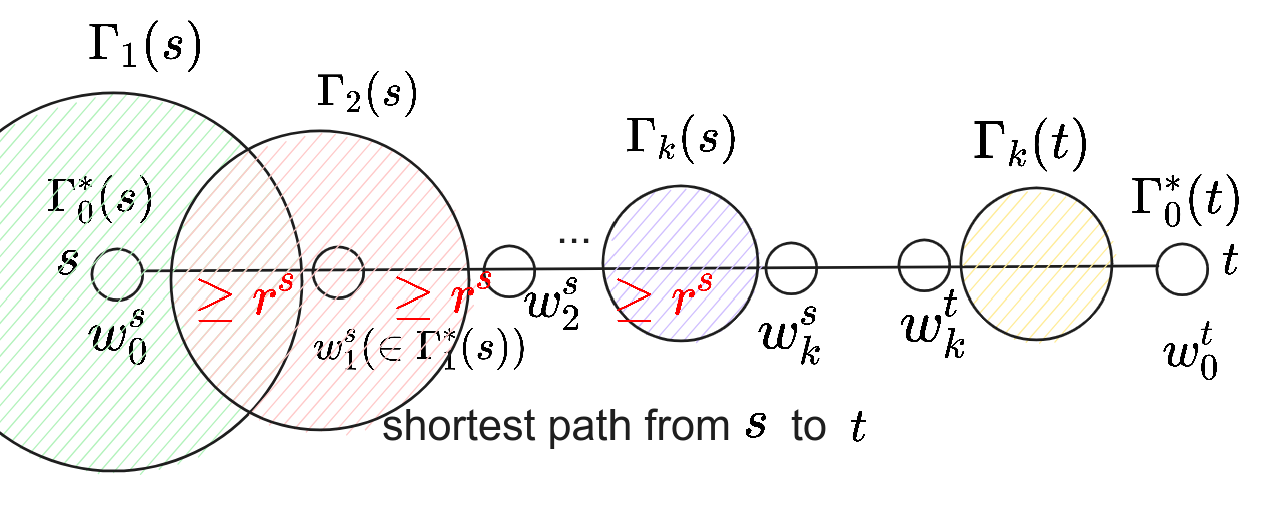
Property 3. 若 \(w_k^t\notin \Gamma^*_k(s)\)(即两向的迭代不交),则 \(d(s, t)\ge 2k\min\lbrace r^s, r^t\rbrace\).
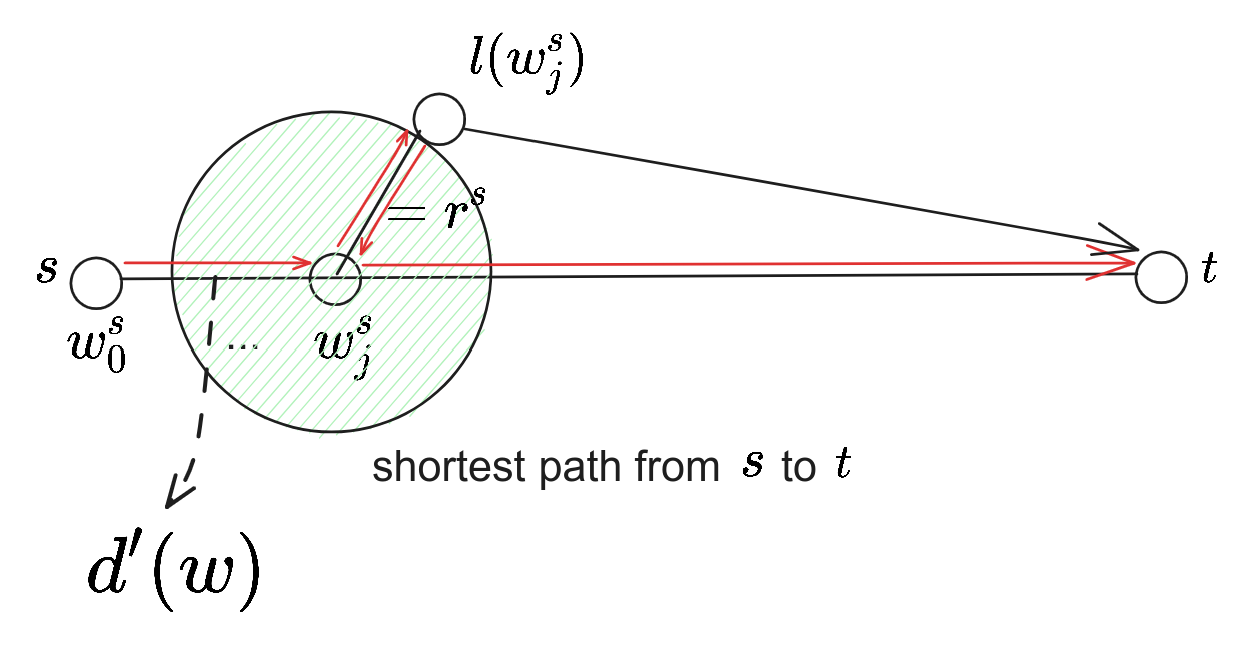
Property 4. query 算法得到的估计距离 \(\delta(s, t)\le d(s, t)+2\min\lbrace r^s, r^t\rbrace\).
- 这是因为第 5. 行使用更新的 \(d'_s(w)+d(w, l(w))+d(l(w), t)\le d(s, t)+2r^s\),\(w\) 选择使得 \(r_{w^s_j}\) 取得 \(r^s\) 的 \(w^s_j\):
stretch 分析
- 当 \(w_k^t\in \Gamma_k^*(s)\) 时,可以得到 \(\delta(s, t)=d(s, t)\),此时得到准确值。
- 当 \(w_k^t\notin \Gamma_k^*(s)\) 时,由 Property 3. 有 \(d(s, t)\ge 2k\min\lbrace r^s, r^t\rbrace\);由 Property 4. 有 \(\delta(s, t)\le d(s, t)+2\min\lbrace r^s, r^t\rbrace\)。从而
\[ \delta(s, t)\le d(s, t)+2\min\lbrace r^s, r^t\rbrace \le d(s, t)+2\cdot d(s, t)/(2k). \]
进而
\[ \dfrac{\delta(s, t)}{d(s, t)}\le 1+1/k. \]
即 stretch 为 \(1+1/k\).
由上知,该算法空间为 \(\tilde O(m+n^2/\alpha)\)。由于每次 query 要进行 \(O(|\Gamma^*_k|)\) 范围的计算 Cadidate distance 和枚举,而每个点 \(v\) 的 \(|B^*(v)|=O(\alpha\mu)\),故最终单次询问复杂度为 \(O((\alpha\mu)^k)\).
平面图的一种 Exact DO
概述
[3] (Djidjev, 1996) 给出了平面图(确切地说,\(O(\sqrt n)\) 分离图)上的一种 construction time \(O(S)\), space \(S=O(S)\), query time \(T=O(n^2/S)\) 的 DO。
满足约束
\[ S\times T=O(n^2). \]
以下只展示 \(S=O(n\sqrt n)\),\(T=O(\sqrt n)\) 的构建方法,其余范围是它的推论。
\(f(n)\) 分离性
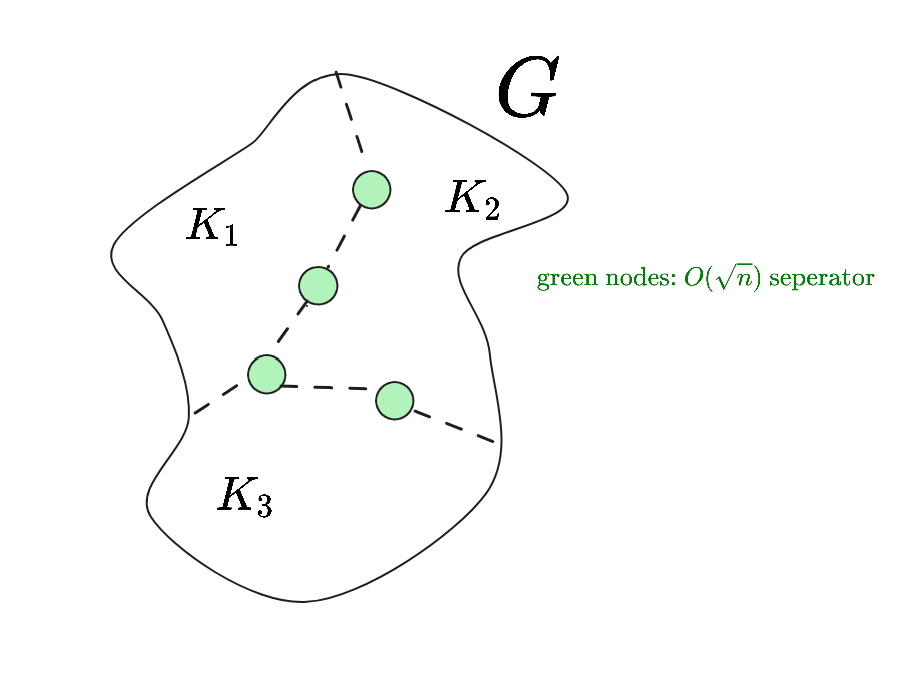
称一类图 \(\mathcal G_{f(n)}\) 具有 \(f(n)\) 分离性,即对 \(G\in \mathcal G_{f(n)}\),存在大小为 \(O(f(n))\) 的 \(C\),使得 \(G-C\) 的每个连通分支的大小均不超过 \(\alpha n\),其中 \(\alpha<1\) 为常数。
Theorem(平面分离定理): 平面图 \(\subseteq \mathcal G_{\sqrt n}\)。
预处理
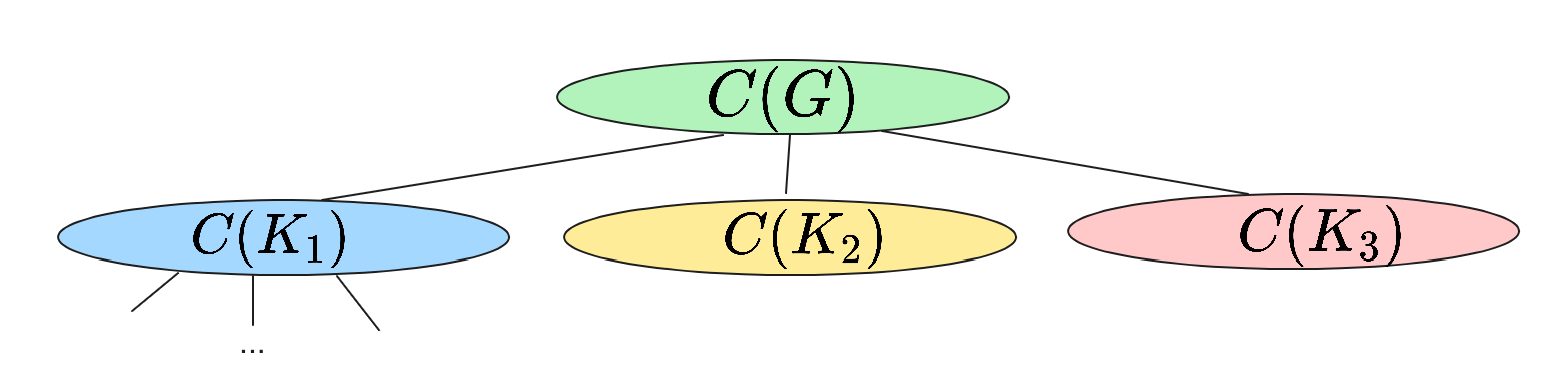
通过递归构造 \(O(\sqrt n)\) seperator,形成一棵 \(O(\log n)\) 深度的树。
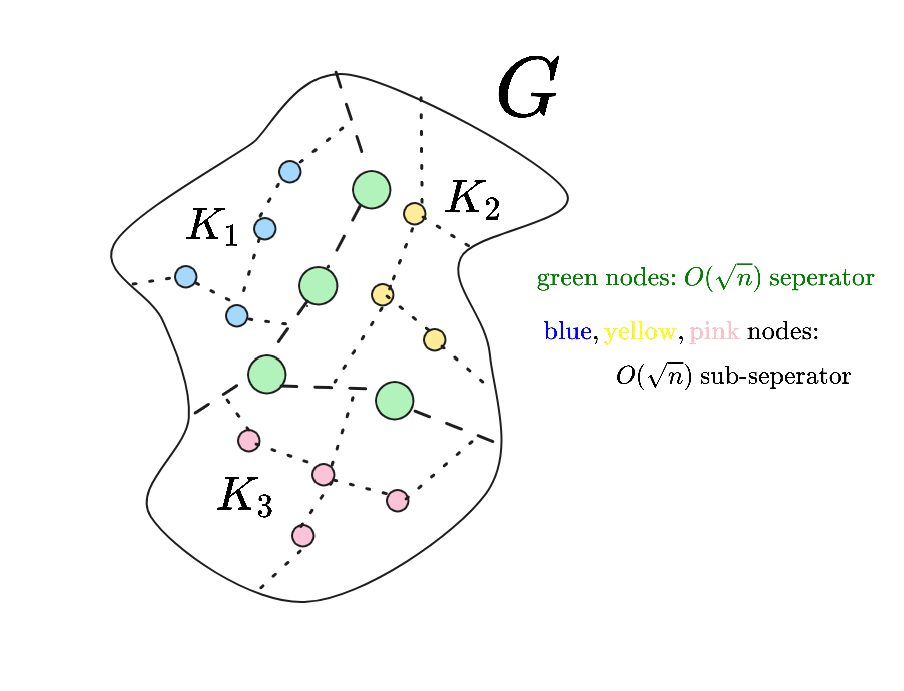
转化为树,树中的每个顶点代表原图中一个 \(O(\sqrt n)\) seperator,即为:
再预处理:树中每个顶点(即一个 \(O(\sqrt n)\) seperator \(C(G_x)\))代表的原图中每个顶点计算到 \(G_x\) 中的每个顶点的距离)。
- 使用 [5] (Henzinger et.al, 1997) 的方法可以在平面图中 \(O(|G|)\) 进行 SSSP。
- 计算一个大小为 \(n_x\) 的\(C(G_x)\) 的信息需要 \(O(n_x\sqrt {n_x})\) 的预处理时间和算法总空间。
预处理时间/算法总空间共计
\[ f(n)=\sum_{i}f(n_i)+O(n\sqrt {n}), \text{where } \sum_{i}n_i=n, n_i\le \alpha n. \]
解得 \(f(n)=O(n\sqrt n)\)。故预处理时间,空间均为 \(O(n\sqrt n)\)。
询问
对于 \(u, v\),找到在树中它们所在的顶点,设它们的 LCA 为 \(C(G_l)\)。输出答案为
\[ d(u, v)=\min_{x\in C(G_l)} \lbrace d(u, x) + d(x, v)\rbrace. \]
这是因为 \(C(G_l)\) 中一定有顶点在 \(u, v\) 的最短路上(它是割集)。单次询问时间 \(O(\sqrt n)\)。
总结
于是,我们得到了平面图(或一般地,\(\mathcal G_{\sqrt n}\))预处理和空间均为 \(O(n\sqrt n)\),单次询问时间为 \(O(\sqrt n)\) 的 DO。
参考文献
[1] Sommer, C. (2014). Shortest-path queries in static networks. ACM Computing Surveys (CSUR), 46(4), 1-31.
[2] Agarwal, R. (2014). The space-stretch-time tradeoff in distance oracles. In Algorithms-ESA 2014: 22th Annual European Symposium, Wroclaw, Poland, September 8-10, 2014. Proceedings 21 (pp. 49-60). Springer Berlin Heidelberg.
[3] Djidjev, H. N. (1996, June). Efficient algorithms for shortest path queries in planar digraphs. In International Workshop on Graph-Theoretic Concepts in Computer Science (pp. 151-165). Berlin, Heidelberg: Springer Berlin Heidelberg.
[4] Alon, N., & Spencer, J. H. (2016). The probabilistic method. John Wiley & Sons.
[5] Henzinger, M. R., Klein, P., Rao, S., & Subramanian, S. (1997). Faster shortest-path algorithms for planar graphs. journal of computer and system sciences, 55(1), 3-23.